
Path Planning for UAV Avalanche Rescue
2021.12-2022.3
Supervisor: Christoph Killing, Prof. Dr. -Ing. Markus Ryll
Technical University of Munich
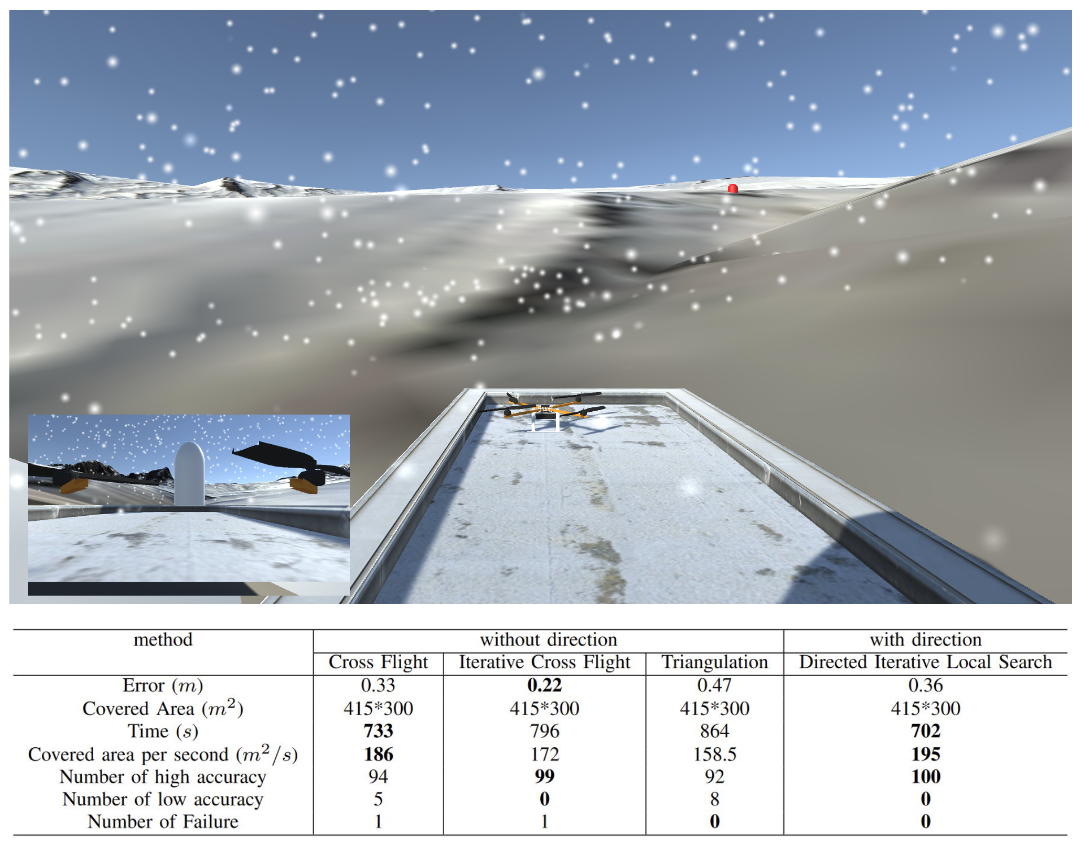
UAV has great application potential in avalanche rescue. In this project, we use different path planning strategies to achieve accurate and rapid positioning and rescue of victims in avalanche scenes. We compare the efficiency, accuracy and robustness of different methods. The results show that iterative methods with more sensor information have higher efficiency and robustness. Under the condition of less sensor information, the traditional geometric method has higher accuracy. The search method can further improved by exploring field-based direct search methods. At the same time, the coverage efficiency of UAVs has been proved to be much higher than that of humans, which provides a simulation basis for future practical applications.
[Project report] [code]